IntroductionDans le monde de l'embarqué, certaines pratiques perdurent. Des habitudes héritées du passé, développées pour des raisons tout à fait valides, se retrouvent ancrées dans des pratiques bien au-delà de leur justification initiale.Parmi…
Tag : Linux
Authentification avec PAM - Examen de quelques modules
IntroductionCet article fait suite à l'article "Authentification avec PAM sous Linux" paru en novembre 2025, qui présentait les principes de fonctionnement de PAM. Le présent article présente une synthèse des fonctions d'une cinquantaine de modules…
Auditing sous Linux
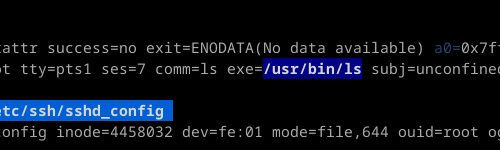
IntroductionL’auditing est un mécanisme de journalisation d’événements système. Il est essentiellement utilisé dans un contexte de sécurité ou de contrôle du respect d’une réglementation. Son but est la surveillance des appels système, des…
Comment exposer à l'espace utilisateur des interruptions avec Userspace I/O System
Dans le développement sur matériel spécifique, il est parfois ardu, ou non-souhaitable, de développer directement un driver dans le kernel. Dans cet article, nous allons voir comment permettre à des applications de l'espace utilisateurs d'interagir…
État de l'art des technologies d'IHM embarquées
Introduction Les interfaces graphiques jouent un rôle crucial dans le succès et l'adoption d'applications. Une bonne interface peut sublimer une application et largement contribuer à son succès. En revanche, une mauvaise interface peut entraver…
Yocto vs Buildroot vs Everyone Else
Les outils Buildroot et Yocto sont les "build systems" (outils de construction) les plus utilisés dans l’environnement Linux embarqué et ils ont été évoqués maintes fois dans de nombreux articles ou ouvrages. Lors des diverses prestations réalisées…
Comment docker permet-il de standardiser et rendre plus efficient le développement et le déploiement d'un projet ?
Dans cet article nous allons voir ce qu'est Docker et comment l'utiliser dans le contexte du développement d'applications. Qu'est-ce que Docker ?Docker est une plate-forme logicielle libre et open source qui permet de lancer des…
Intégration de Rust dans Buildroot
( English version below ) Introduction Rust est un langage récent qui a fait ses débuts en 2015. Depuis son apparition, il a été introduit dans de plus en plus de domaines du développement logiciel. L'objectif du langage est de…
Introduction à OSTree
IntroductionDans le monde de l’embarqué, une des questions récurrentes concerne la stratégie de mise à jour du système. Pour répondre à cette problématique plusieurs outils existent aujourd’hui (SWUpdate, Mender, Rauc, OSTree, ...), nous allons ici…
Découverte des mécanismes d’économie d’énergie du kernel Linux
Introduction Dans le cadre de mon stage au sein de Smile ECS, j’ai travaillé sur des moyens d’optimiser la consommation énergétique des systèmes embarqués. Le but de ce post est de vous présenter une méthode pour mesurer la consommation et le…